 ɨһɨ���ֻ����
ɨһɨ���ֻ����









- �¹�������ES2T 1854607
��ϸ��Ϣ
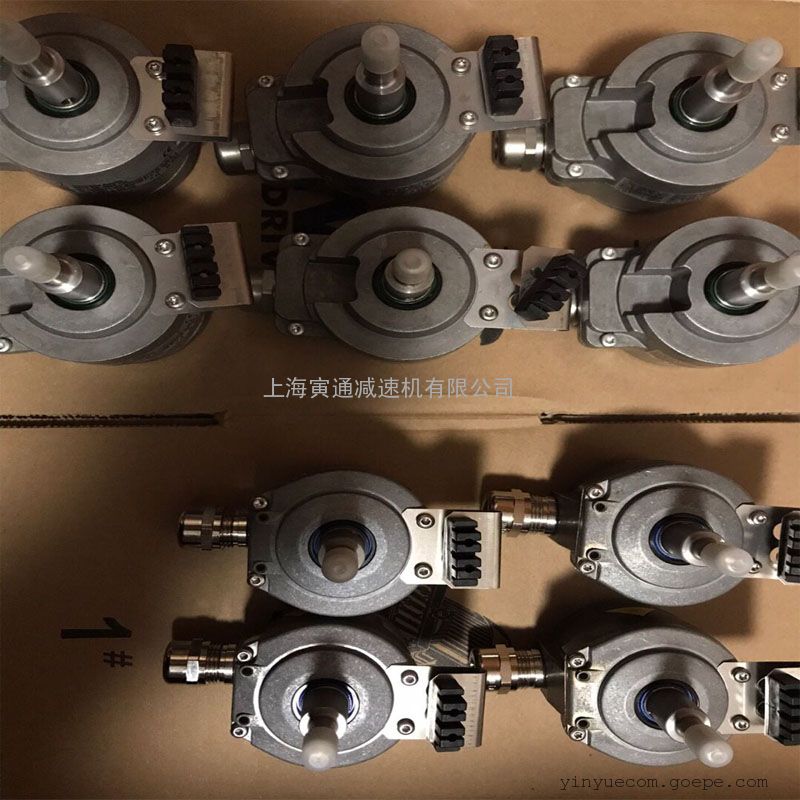
�ӹ��������� ��������������� �������� �ͺ���ES2T 1854607 ���÷�Χ�����β����װ �¹�sewԭװES2T�������ֻ�,�¹�SEW����ƶ���Ȧ��ɲ����բBMG05,BMG1,BMG2
SEW���ٻ���SEW�����SEW��Ƶ����SEW��������SEW�ƶ�����SEW�ƶ����衢SEW������塢SEW��Դ�˲�����Ȧ��SEW��Դ�˲�����SEWͨѶģ�顢SEWͨѶģ�顢SEW����������DER11BSEW���߿�DFP21B��SEW������ͨѶ�ߡ�SEW�ͺ�ת����UWS11A��SEWͨѶ����USB11A�Ȳ�Ʒ



�¹�SEW���ٻ�——Kϵ�С�Fϵ�С�Rϵ�С�Sϵ�С�Wϵ�е�
Kϵ������ɡ���ּ����䣺 K/KA/KAF/KF��K37/k47/k57/k67/k77/k87/k97/k107/k127/k157/k167/k187
Fϵ��б��Բ�����ּ����䣺 F/FA/FAF/FF��F37/F47/F57/F67/F77/F87/F97/F107/F127/F157 ,
Rϵ��б���ּ����䣺 R/RF��R37/R47/R57/R67/R77/R87/R97/R107/R137/R147/R167 ,
Sϵ��б�������ּ����䣺 S/SA/SAF/SF�� S37/S47/S57/S67/S77/S87/S97
Wϵ�����ϴСϵ�м��ٻ��� W20 WF2O WA20 WAF20 W30 WF30 WA30 WAF3�¹�SEW������ES1T,ES2T,ES1R,ES2R,ES1S,ES2S,ES1C,ES2C,EV1T,EV1R,EV1S,EV1C��

�¹�SEW����ƶ������ϵ��——
SEWɲ��ƬBMG05-BMG1,BMG2-BMG4,BMG15,BM30-BM62
SEW�ƶ���ȦBMG05,BMG1,BMG2,BMG4,BMG8,BM15,BM30-62
SEW������BG1.5,BGE1.5,BMK1.5��BME1.5SEW������
SEW��������encoder���ǽ��źţ���������������ݽ��б��ơ�ת��Ϊ������ͨѶ������ʹ洢���ź���ʽ���豸�� �������ѽ�λ�ƻ�ֱ��λ��ת���ɵ��źţ�ǰ�߳�Ϊ���̣����߳���ߣ����ն�����ʽ���������Է�Ϊ�Ӵ�ʽ�ͷǽӴ�ʽ���֣��Ӵ�ʽ���õ�ˢ�����һ��ˢ�Ӵ����������Ե������ʾ�����״̬��"1”����“0”���ǽӴ�ʽ�Ľ�������Ԫ���ǹ���Ԫ�������Ԫ�������ù���Ԫ��ʱ�������Ͳ���������ʾ�����״̬��"1”����"0”��ͨ��"1”��“0”�Ķ����Ʊ��������ɼ����������ź�ת��Ϊ������ɶ�ȡ�ĵ��ź�����ͨѶ������ʹ��档

 �¹�SEW���������Ĺ���ԭ��
�¹�SEW���������Ĺ���ԭ��
�¹�SEW������������������һ��ͨ�����ת����������ϵĻ�е����λ����ת�����������������SEW���������¹�SEW����������ĿǰӦ��*��Ĵ��������¹�SEW�����������������ɹ�դ�̺����װ����ɡ���դ������һ��ֱ����Բ���ϵȷֵؿ�ͨ���ɸ������οס���Ϊ������������ͷͬ�ᣬ����ͷ��תʱ���¹�SEW��������դ�������ͷͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������ź�;ͨ������ÿ����������������ĸ������ܷ�ӳ��ǰ����ͷ��ת�١����⣬�¹�SEW������Ϊ�ж���ת���¹�SEW���������̻����ṩ��λ���90o����·�����źš�
ES1T, ES1S,ES1C, ES1R, ES2T��ES2S��ES2C, ES2R, EV1T,EV1S,EV1C,NV11��NV21��NV12��NV22��EH1T��EH1S��EH1R��AV1Y��AV1H��EH1T��EH1S��EH1R��EV1T��ES12��ES22��ES16��ES26��NV11��NV16��EN22��EV26��ES31
SEW�ƶ����ͺ�: BMG02��BR03��BMG05��BMG1��BMG2��BMG4��BMG8��BM15��BM30��BM31��BM32��BM62��BMG61��BMG122 BE05��BE1��BE2��BE5��BE11��BE20��BE30��BE32��BE122
���ٻ��������� bg1.5 �ɹ�ѡ���У�bg1.5 bge1.5 BMH1.5 BME1.5 BME3 ��Ʒ����ţ�8253846 8253854 bg1.5��bge1.5���ƶ�����ϵͳ ���SEW�����������������γɵ����������Ӧ�Ĺ�紫������������Դ���������̡����������ܺ�����������·��������ת��һ���ĽǶ�ʱ����������������Ӧ�Ĺ��������ܵ�ͨ������͵�ƽ“0”���ڹ�������Ӧ�Ĺ��������ܲ���ͨ������ߵ�ƽ“1”�������γ�����뷽ʽһ�µĸߡ��͵�ƽ������Ӷ����������λ�ýš�
���SEW������ԭ��
�������SEW����������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ���������ĿǰӦ��*��Ĵ�������һ��Ĺ��SEW��������Ҫ�ɹ�դ�̺����װ����ɡ����ŷ�ϵͳ�У����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������źš�ͨ������ÿ����SEW�������������ĸ������ܷ�ӳ��ǰ�綯����ת�١����⣬Ϊ�ж���ת�������̻����ṩ��λ���90°��2��ͨ���Ĺ������������˫ͨ�������״̬�仯ȷ�������ת���ݼ��ԭ����SEW�������ɷ�Ϊ��ѧʽ����ʽ����Ӧʽ�͵���ʽ��������̶ȷ������ź������ʽ���ɷ�Ϊ����ʽ������ʽ�Լ����ʽ3�֡�
SEW������ԭ�����SEW����������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ�����������ĿǰӦ��*��Ĵ����������SEW���������ɹ�դ�̺����װ����ɡ���դ������һ��ֱ����Բ���ϵȷֵؿ�ͨ���ɸ������οס����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������źţ���ԭ��ʾ��ͼ��ͼ1��ʾ��ͨ������ÿ����SEW�������������ĸ������ܷ�ӳ��ǰ�綯����ת�١�
1.1����ʽSEW������
����ʽSEW��������ֱ�����ù��ת��ԭ��������鷽������A��B��Z�ࣻA��B����������λ��90��Ӷɷ�����жϳ�н���Z��Ϊÿתһ�����壬���ڻ��㶨λ�������ŵ���ԭ���������еƽ���������ڼ���Сʱ���ϣ�����������ǿ���ɿ��Ըߣ��ʺ��ڳ����봫�䡣��ȱ�����������ת���ľ���λ����Ϣ��1.2����ʽSEW������
����SEW��������ֱ������������Ĵ���������SEW������Բ���������ؾ���������ͬ�������ÿ����������Ͳ���������������ɣ����������������Ŀ��˫����ϵ�������ϵ�������������Ķ����������λ���������̵�һ���ǹ�Դ����һ���Ӧÿһ�����һ����Ԫ���������̴��ڲ�ͬλ��ʱ��������Ԫ�������ܹ������ת������Ӧ�ĵ�ƽ�źţ��γɶ�������������SEW���������ص��Dz�Ҫ����������ת�������λ�ö��ɶ���һ���̶�����λ�����Ӧ�������롣��Ȼ�����Խ�࣬�ֱ��ʾ�Խ�ߣ�����һ������ Nλ�����Ʒֱ��ʵ�SEW�������������̱�����N�������Ŀǰ��������16λ�ľ���SEW��������Ʒ������ʽSEW��������������Ȼ�����ƻ�ѭ�������ƣ������룩��ʽ���й��ת���ġ�����ʽSEW������������ʽSEW��������֮ͬ������Բ�����⡢���������ͼ�Σ�����SEW�������������ɱ��룬���ݶ��������ϵı��룬������λ�á��������ƿɲ��ö������롢ѭ���롢�����Ʋ���ȡ������ص��ǣ�
1.2.1����ֱ�Ӷ����Ƕ�����ľ���ֵ��
1.2.2û���ۻ���
1.2.3��Դ�г���λ����Ϣ���ᶪʧ�����Ƿֱ������ɶ����Ƶ�λ���������ģ�Ҳ����˵����ȡ����λ����Ŀǰ��10λ��14λ�ȶ��֡�1.3���ʽ����ֵSEW������
���ʽ����ֵSEW�������������������Ϣ��һ����Ϣ���ڼ��ż�λ�ã����о�����Ϣ���ܣ���һ������ȫͬ����ʽSEW�������������Ϣ�����SEW��������һ�ֽǶȣ����ٶȣ����װ�ã�SEW���������������ĽǶ��������ù��ת��ԭ��ת������Ӧ�ĵ���������������������С�����ȸߣ������ɿ�,�ӿ����ֻ����ŵ㡣���㷺Ӧ�������ػ�������ת̨���ŷ������������ˡ��״����Ŀ��ⶨ����Ҫ���Ƕȵ�װ�ú��豸�С�
ԭ��
���SEW����������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ�����������ĿǰӦ��*��Ĵ����������SEW���������ɹ�դ�̺����װ����ɡ���դ������һ��ֱ����Բ���ϵȷֵؿ�ͨ���ɸ������οס����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������źţ���ԭ��ʾ��ͼ��ͼ1��ʾ��ͨ������ÿ����SEW�������������ĸ������ܷ�ӳ��ǰ�綯����ת�١����⣬Ϊ�ж���ת�������̻����ṩ��λ���90�����·�����źš
1.1����ʽSEW������
����ʽSEW��������ֱ�����ù��ת��ԭ��������鷽������A��B��Z�ࣻA��B����������λ��90��Ӷɷ�����жϳ�н���Z��Ϊÿתһ�����壬���ڻ��㶨λ��SEW���������ŵ���ԭ���������еƽ���������ڼ���Сʱ���ϣ�����������ǿ���ɿ��Ըߣ��ʺ��ڳ����봫�䡣��ȱ�����������ת���ľ���λ����Ϣ��1.2����ʽSEW������
����SEW��������ֱ������������Ĵ�������������Բ���������ؾ���������ͬ�������ÿ����������Ͳ���������������ɣ����������������Ŀ��˫����ϵ�������ϵ�������������Ķ����������λ���������̵�һ���ǹ�Դ����һ���Ӧÿһ�����һ����Ԫ���������̴��ڲ�ͬλ��ʱ��������Ԫ�������ܹ������ת������Ӧ�ĵ�ƽ�źţ��γɶ�������������SEW���������ص��Dz�Ҫ����������ת�������λ�ö��ɶ���һ���̶�����λ�����Ӧ�������롣��Ȼ�����Խ�࣬�ֱ��ʾ�Խ�ߣ�����һ������ Nλ�����Ʒֱ��ʵ�SEW�������������̱�����N�������Ŀǰ��������16λ�ľ���SEW��������Ʒ������ʽSEW��������������Ȼ�����ƻ�ѭ�������ƣ������룩��ʽ���й��ת���ġ�����ʽSEW������������ʽSEW��������֮ͬ������Բ�����⡢���������ͼ�Σ�����SEW�������������ɱ��룬���ݶ��������ϵı��룬������λ�á��������ƿɲ��ö������롢ѭ���롢�����Ʋ���ȡ������ص��ǣ�
1.2.1����ֱ�Ӷ����Ƕ�����ľ���ֵ��
1.2.2û���ۻ���
1.2.3��Դ�г���λ����Ϣ���ᶪʧ�����Ƿֱ������ɶ����Ƶ�λ���������ģ�Ҳ����˵����ȡ����λ����Ŀǰ��10λ��14λ�ȶ��֡�1.3���ʽ����ֵSEW������
���ʽ����ֵSEW�������������������Ϣ��һ����Ϣ���ڼ��ż�λ�ã����о�����Ϣ���ܣ���һ������ȫͬ����ʽSEW�������������Ϣ�����SEW��������һ�ֽǶȣ����ٶȣ����װ�ã������������ĽǶ��������ù��ת��ԭ��ת������Ӧ�ĵ���������������������С�����ȸߣ������ɿ�,�ӿ����ֻ����ŵ㡣���㷺Ӧ�������ػ�������ת̨���ŷ������������ˡ��״����Ŀ��ⶨ����Ҫ���Ƕȵ�װ�ú��豸�С�
2. ���SEW��������Ӧ�õ�·
2.1 EPC��755A���SEW��������Ӧ��
EPC��755A���SEW�������߱����õ�ʹ�����ܣ��ڽǶȲ�����λ�Ʋ���ʱ������������ǿ���������ȶ��ɿ�����������źţ��Ҹ������źž�������ɵõ��������������źš���ˣ�����������������ʻģ����ʱ���Է�������ת�ǶȵIJ���ѡ��EPC��755A���SEW��������Ϊ���������������·ѡ�ü��缫��·�ͣ�����ֱ���ѡ��360������/Ȧ�����ǵ�����������ת����˫��ģ��ȿ�˳ʱ����ת��Ҳ����ʱ����ת����Ҫ��SEW������������źż������ܼ�����ͼ2�����˹��SEW������ʵ��ʹ�õļ�����˫�������·�������·��1��D��������2���������ɣ�������·��3Ƭ74LS193��ɡ������SEW������˳ʱ����תʱ��ͨ��A������γ�ǰͨ��B�������90°��D���������Q(����W1)Ϊ�ߵ�ƽ��Q(����W2)Ϊ�͵�ƽ����������Ŵ���������ͨ��(����W3)������˫�������74LS193�ļ����������CU�����мӷ���������ʱ����������Źرգ������Ϊ�ߵ�ƽ(����W4)�������SEW��������ʱ����תʱ��ͨ��A������α�ͨ��B��������ӳ�90°��D���������Q(����W1)Ϊ�͵�ƽ��Q(����W2)Ϊ�ߵ�ƽ����������Źرգ������Ϊ�ߵ�ƽ(����W3)����ʱ����������Ŵ���������ͨ��(����W4)������˫�������74LS193�ļ����������CD�����м���������
����������˳ʱ�����ʱ����תʱ����*����ת�ǶȾ�Ϊ��Ȧ�룬ѡ�÷ֱ���Ϊ360������/Ȧ��SEW����������*�����������Ϊ900����ʵ��ʹ�õļ�����·��3Ƭ74LS193��ɣ���ϵͳ�ϵ��ʼ��ʱ���ȶ�����и�λ(CLR�ź�)���ٽ����ֵ��Ϊ800H����2048(LD�ź�)����ˣ���������˳ʱ����תʱ��������·�������ΧΪ2048��2948������������ʱ����תʱ��������·�������ΧΪ2048��1148��������·���������D0��D11�������ݴ�����·��
ʵ��ʹ��ʱ��������Ƶ���ؽ���˳ʱ�����ʱ��ת�������ڴ��������������ϳ�һ��ʱ������̻���ʱ������·������ܲ���2048�������м����ֵ�ƫ�Ϊ�����һ���⣬����������һ�������̻��м���·��ϵͳ���������ݴ�����·��ģ�������ڷDz���״̬ʱ��ϵͳ�����м���·���������̴��ڻ���״̬����������·�������������2048���ɶԼ�����·���и�λ�����������ó�ֵ��
2.2 ���SEW�������������������е�Ӧ��
������תʽ���SEW��������������ת���������������в�����ť�������������������в�����ť�Ľ�λ����ת��Ϊij�ֵ��ź�������תʽ���SEW�����������֣�����SEW������������SEW������
����SEW����������������ʽ����Ĵ������������̱Ⱦ���SEW����������Ҫ�ö��ҷֱ��ʸ��ߡ�һ��ֻ��Ҫ�����������������ʵ�����Ѳ����о���SEW��������������壬���Dz����������塣�������̵�������м������Ŀ��ͬ���ȷֲ�����Ͳ��������������դ����������������������������������ת��ʱ����������ź�����λ��Ϊ90°��A���B�������ź��Լ�ֻ��һ��������ĵ�������������������źţ�����Ϊ���̵Ļ�λ�ã�������ϵͳ�ṩһ����ʼ����λ�źţ�����A��B��������źŵ���λ��ϵ����ǰ���ͺ��ж���ת�ķ�����ͼ3��a���ɼ�����������תʱ��A�����岨�α�B����ǰπ/2������תʱ��A�������B���ͺ�π/2��ͼ3��b����һʵ�ʵ�·����A�����β������ش�������̬��������������B�����β���‘��’����������תʱֻ������������������֮��ֻ������������������ˣ�����SEW�������Ǹ����������Դ�����������ȷ�����̵�ת���������Խ�λ������ͨ������SEW��������N�������������źţ�����λ��Ϊπ/ N���ɼ�������Ϊ2N����դ��������N=2��ͼ3��·��ȱ������ʱ�����������������������������ڵ�ijһ���źŴ���‘��’��‘��’��ƽ״̬������һ���ź�������‘��’�� ‘��’֮��������仯״̬����ʱ������Ȼδ����λ�ƣ����ǻ�����������������塣���磬���̷����������ֶ���λ��ʱ��������Կ������������Dz���ʱ�ͻ��������������
ͼ4��һ�����ܷ�ֹ������������߷ֱ��ʵ��ı�Ƶϸ�ֵ�·��������������м��书�ܵ�D�ʹ�������ʱ�ӷ�����·����ͼ4�ɼ���ÿһ��������D���������ӣ���������ʱ������ļ���У�����Q�ˣ����ӦB����74LS175�ĵ�2��7���ţ�����ǰ����ʱ���ڵ�����״̬����������ͬ�����ʾʱ�Ӽ�����ޱ仯�������Ը������߹�ϵ�жϳ����ı仯���Ӷ�����‘����’��‘����’������塣��ij����������‘��’��‘��’�������仯ʱ�����������‘����’��‘����’���壬���ڶ�����������ȡ������ʱ�Ϳ��������ǵ�Ӱ�죨���������Ķ���Ҳ���漰��㣩���ɴ˿ɼ���ʱ�ӷ�������Ƶ��Ӧ������Ƶ�ʵĿ���*��ֵ����ͼ4���ɿ�������ԭһ�������źŵ������ڣ��õ����ĸ��������塣���磬ԭÿȦ������Ϊ1000��SEW�������ɲ���4��Ƶ����������4000������ֱ���Ϊ0.09°��ʵ���ϣ�Ŀǰ���ഫ������Ʒ��������Ԫ������źŵķŴ����εȵ�·�봫�м��Ԫ����װ��һ������ֻҪ����ϸ���������·�Ϳ������һ����λ�Ʋ���ϵͳ(74159��4-16������)��
1.SEW�����������������N��Ҫ���б������Ϣ�ĸ����������������n�����ñ����λ����֮��Ӧ�����ϵʽN≤2n��2.SEW��������ÿ������˶�����һ������������ʮ��������������Ϣ���ţ�������N���������ÿ��ֻ������һ������������źţ�����͵�ƽ��Ч������ߵ�ƽ��Ч�������Ϊ��Ӧ�Ķ����ƴ�������ʮ���ƴ��루BCD�룩��
3.��ȷʹ��SEW�������Ŀ��ƶˣ�����������չSEW�������Ĺ��ܡ�
һ�����SEW�������Ĺ���ԭ��
���SEW����������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ�����������Ŀ
ǰӦ��*��Ĵ����������SEW���������ɹ�դ�̺����װ����ɡ���դ������һ��ֱ����Բ���ϵȷ�
�ؿ�ͨ���ɸ������οס����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������
������ܵȵ���Ԫ����ɵļ��װ�ü��������������źţ���ԭ��ʾ��ͼ��ͼ1��ʾ��ͨ������ÿ���
��SEW�������������ĸ������ܷ�ӳ��ǰ�綯����ת�١����⣬Ϊ�ж���ת�������̻����ṩ��λ���
90o����·�����źš�
���ݼ��ԭ����SEW�������ɷ�Ϊ��ѧʽ����ʽ����Ӧʽ�͵���ʽ��������̶ȷ������ź������ʽ���ɷ�Ϊ����ʽ������ʽ�Լ����ʽ���֡�
��һ������ʽSEW������
����ʽSEW��������ֱ�����ù��ת��ԭ��������鷽������A��B��Z�ࣻA��B����������λ��90o���Ӷ���
������жϳ���ת����Z��Ϊÿתһ�����壬���ڻ��㶨λ�������ŵ���ԭ���������еƽ��
�������ڼ���Сʱ���ϣ�����������ǿ���ɿ��Ըߣ��ʺ��ڳ����봫�䡣��ȱ�����������ת���ľ�
��λ����Ϣ��
����������ʽSEW������
����SEW��������ֱ������������Ĵ�������������Բ���������ؾ���������ͬ�������ÿ�����������
����������������ɣ����������������Ŀ��˫����ϵ�������ϵ�������������Ķ����������λ
���������̵�һ���ǹ�Դ����һ���Ӧÿһ�����һ����Ԫ���������̴��ڲ�ͬλ��ʱ��������Ԫ����
���ܹ������ת������Ӧ�ĵ�ƽ�źţ��γɶ������������ֱ��������ص��Dz�Ҫ����������ת�������
λ�ö��ɶ���һ���̶�����λ�����Ӧ�������롣��Ȼ�����Խ�࣬�ֱ��ʾ�Խ�ߣ�����һ������ Nλ
�����Ʒֱ��ʵ�SEW�������������̱�����N�������Ŀǰ��������16λ�ľ���SEW��������Ʒ��
����ʽSEW��������������Ȼ�����ƻ�ѭ�������ƣ������룩��ʽ���й��ת���ġ�����ʽSEW������������ʽ
SEW��������֮ͬ������Բ�����⡢���������ͼ�Σ�����SEW�������������ɱ��룬���ݶ��������ϵı�
�룬������λ�á��������ƿɲ��ö������롢ѭ���롢�����Ʋ���ȡ������ص��ǣ�
1������ֱ�Ӷ����Ƕ�����ľ���ֵ��
2��û���ۻ���
3����Դ�г���λ����Ϣ���ᶪʧ�����Ƿֱ������ɶ����Ƶ�λ���������ģ�Ҳ����˵����ȡ����λ����
Ŀǰ��10λ��14λ�ȶ��֡�
���������ʽ����ֵSEW������
���ʽ����ֵSEW�������������������Ϣ��һ����Ϣ���ڼ��ż�λ�ã����о�����Ϣ���ܣ���һ������
ȫͬ����ʽSEW�������������Ϣ��
���SEW��������һ�ֽǶȣ����ٶȣ����װ�ã������������ĽǶ��������ù��ת��ԭ�� ת������Ӧ��
����������������������С�����ȸߣ������ɿ�,�ӿ����ֻ����ŵ㡣���㷺Ӧ�������ػ�������ת̨
���ŷ������������ˡ��״����Ŀ��ⶨ����Ҫ���Ƕȵ�װ�ú��豸�С�
�������SEW��������Ӧ�õ�·
��һ��EPC��755A���SEW��������Ӧ��
EPC��755A���SEW�������߱����õ�ʹ�����ܣ��ڽǶȲ�����λ�Ʋ���ʱ������������ǿ���������ȶ��ɿ�
����������źţ��Ҹ������źž�������ɵõ��������������źš���ˣ�����������������ʻģ����
ʱ���Է�������ת�ǶȵIJ���ѡ��EPC��755A���SEW��������Ϊ���������������·ѡ�ü��缫��·�ͣ���
���ֱ���ѡ��360������/Ȧ�����ǵ�����������ת����˫��ģ��ȿ�˳ʱ����ת��Ҳ����ʱ����ת����
Ҫ��SEW������������źż������ܼ�����ͼ2�����˹��SEW������ʵ��ʹ�õļ�����˫�������·�������
·��1��D��������2���������ɣ�������·��3Ƭ74LS193���
�����SEW������˳ʱ����תʱ��ͨ��A������γ�ǰͨ��B�������90°��D���������Q������W1��Ϊ�ߵ�ƽ��Q������W2��Ϊ�͵�ƽ����������Ŵ���������ͨ��������W3��������˫�������74LS193�ļ�
���������CU�����мӷ���������ʱ����������Źرգ������Ϊ�ߵ�ƽ������W4���������SEW��������
ʱ����תʱ��ͨ��A������α�ͨ��B��������ӳ�90°��D���������Q������W1��Ϊ�͵�ƽ��Q������W2
��Ϊ�ߵ�ƽ����������Źرգ������Ϊ�ߵ�ƽ������W3������ʱ����������Ŵ���������ͨ����
����W4��������˫�������74LS193�ļ����������CD�����м���������
����������˳ʱ�����ʱ����תʱ����*����ת�ǶȾ�Ϊ��Ȧ�룬ѡ�÷ֱ���Ϊ360������/Ȧ��SEW������
����*�����������Ϊ900����ʵ��ʹ�õļ�����·��3Ƭ74LS193��ɣ���ϵͳ�ϵ��ʼ��ʱ���ȶ����
�и�λ��CLR�źţ����ٽ����ֵ��Ϊ800H����2048��LD�źţ�����ˣ���������˳ʱ����תʱ��������
·�������ΧΪ2048��2948������������ʱ����תʱ��������·�������ΧΪ2048��1148��������·��
�������D0��D11�������ݴ�����·��
ʵ��ʹ��ʱ��������Ƶ���ؽ���˳ʱ�����ʱ��ת�������ڴ��������������ϳ�һ��ʱ�����
�̻���ʱ������·������ܲ���2048�������м����ֵ�ƫ�Ϊ�����һ���⣬����������һ��������
���м���·��ϵͳ���������ݴ�����·��ģ�������ڷDz���״̬ʱ��ϵͳ�����м���·������
���̴��ڻ���״̬����������·�������������2048���ɶԼ�����·���и�λ�����������ó�ֵ��
���������SEW�������������������е�Ӧ��
������תʽ���SEW��������������ת���������������в�����ť�������������������в�����ť�Ľ�λ��
��ת��Ϊij�ֵ��ź�������תʽ���SEW�����������֣����Ա�����������SEW��������
����SEW����������������ʽ����Ĵ������������̱Ⱦ���SEW����������Ҫ�ö��ҷֱ��ʸ��� ��һ��ֻ��
Ҫ�����������������ʵ�����Ѳ����о���SEW��������������壬���Dz����������塣�������̵����
���м������Ŀ��ͬ���ȷֲ�����Ͳ��������������դ��������������������������������
��ת��ʱ����������ź�����λ��Ϊ90°��A���B������ �ź��Լ�ֻ��һ��������ĵ������������
�������źţ�����Ϊ���̵Ļ�λ�ã�������ϵͳ�ṩһ����ʼ����λ�źţ�����A��B��������źŵ�
��λ��ϵ����ǰ���ͺ��ж���ת�ķ���������תʱ��A�����岨�α�B����ǰπ/2������תʱ ��
A�������B���ͺ�π/2����һʵ�ʵ�·����A�����β������ش�������̬ ��������������B�����β���‘
��’����������תʱֻ������������������֮��ֻ������������������ˣ�����SEW�������Ǹ������
����Դ�����������ȷ�����̵�ת���������Խ�λ������ͨ������SEW��������N�������������źţ���
��λ��Ϊπ/ N���ɼ�������Ϊ2N����դ��������N=2����·��ȱ������ʱ����������������� ��
����������ڵ�ijһ���źŴ���“��”��“��”��ƽ״̬������һ���ź�������“��”�� “��”֮���
�����仯״̬����ʱ������Ȼδ����λ�ƣ����ǻ�����������������塣���磬���̷����������ֶ�
��λ��ʱ��������Կ������������Dz���ʱ�ͻ��������������
��һ�����ܷ�ֹ������������߷ֱ��ʵ��ı�Ƶϸ�ֵ�·��������������м��书�ܵ�D�ʹ�������ʱ
�ӷ�����·��ÿһ��������D���������ӣ���������ʱ���� ��ļ���У�����Q�ˣ����ӦB����74LS175
�ĵ�2��7���ţ�����ǰ����ʱ���ڵ����� ״̬����������ͬ�����ʾʱ�Ӽ�����ޱ仯�������Ը�
�����߹�ϵ�жϳ����ı仯�� �Ӷ�����‘����’��‘����’������塣��ij����������‘��’��
‘��’�������仯 ʱ�����������‘����’��‘����’���壬���ڶ�����������ȡ������ʱ�Ϳ�������
�ǵ�Ӱ�죨���������Ķ���Ҳ���漰��㣩���ɴ˿ɼ���ʱ�ӷ�������Ƶ��Ӧ������Ƶ�ʵĿ��� *��
ֵ����ͼ4���ɿ�������ԭһ�������źŵ������ڣ��õ����ĸ��������塣���磬ԭÿȦ������Ϊ1000��
SEW�������ɲ���4��Ƶ����������4000������ֱ���Ϊ0.09°��ʵ���� ��Ŀǰ���ഫ������Ʒ��������Ԫ
������źŵķŴ����εȵ�·�봫�м��Ԫ����װ��һ������ֻҪ����ϸ���������·�Ϳ������һ
����λ�Ʋ���ϵͳ��74159��4-16����������
����Ӧ��������������Ľ���ʩ��һ��Ӧ�����������
�����װ�õķ���ͽ���װ�ö���װ�������ֳ�����ʹ���б�¶������ȱ�ݣ�������������Ҳ������
���أ���Ҫ���������¼������棺1������װ�û����װ�����е��ԭ����������λ��ƫ�ƣ�����
����װ�ò��ܿɿ��Ľ��յ����źţ������ܲ������źš����磻���SEW������Ӧ�������ֵ���ϵͳ�У���
���SEW��������ֱ������˨�̶��ڵ綯��������ϣ����SEW����������ͨ����Ӳ�ĵ���Ƭ�͵綯��ת������
�ӣ���綯�����������dz���Ը��أ�����������ʱ������綯��ת�����ǵ������ⶨ������ʱ
���SEW���������ٶ�Ϊ2.6mm/s�����������ٶȻ����SEW���������ڲ����ܡ���������壬�Ӷ���
�¿���ϵͳ���ȶ��������������¹ʷ�����
2��������װ�ð�װ�������ֳ����������ֳ���������Ӱ�쵼�¹����װ�ò��ܿɿ��Ĺ������簲
װ��λ�¶ȸߡ�ʪ�ȴ��¹����װ���ڲ��ĵ���Ԫ�����Ըı��������������������������
ϵͳ�����ڹ����װ�ð�װ��λ�ÿ��������������¶ȸ߶����¹����װ�����źŻ�����
���������������¹ʡ�
3�������ֳ��ĸ��ֵ�Ÿ���Դ���Թ����װ�ò����ĸ��ţ����¹����װ��������η�������ʧ��
��ʹϵͳ�����������¹ʡ����磻�����װ�ð�װ�������豸���壬���źž����´���������ϵ
ͳ�ľ���һ����20m��100m�����������Ȼһ�㶼ѡ�ö�о���ε��£������ڵ��µĵ��ߵ��輰�����
��Ӱ���ټ��Ϻ���������ͬ��һ����裬�����ܵ����ֵ�Ÿ��ŵ�Ӱ�죬���������ʧ�棬�Ӷ�ʹ��
��������ϵͳ���ź���ʵ��ֵ��ƫ�������ϵͳ�����½���
�������Ľ���ʩ
1���ı���SEW�������İ�װ��ʽ�����SEW���������ڰ�װ�ڵ綯������ϣ������ڵ綯���Ļ���������һ��
��֧����������װ���SEW�����������SEW����������綯�������ı��봦��ͬһˮƽ�߶ȣ������������
���������������ӣ��Լ���綯��������ضԹ��SEW�������Ļ�е��������ô˷�ʽ�����Ǽ�⣬��
���ٶȽ���1.2mm/s��
2������ѡ������װ������źŴ�����ʣ�����˫�����ε���ȡ����ͨ���ε��¡�˫�����ε��¾���
������Ҫ�ļ������ԣ�һ�ǶԵ����ܵ��ĵ�Ÿ��ž��н�ǿ�ķ�����������Ϊ�ռ��ų������ϲ�����
���ŵ������Ի��������˫�����ε��µ���һ�������ص��ǻ��ʺ�������С�����߶Ը�����·�ľ�
�������ȣ����߶��������ķֲ�����Ҳ������ͬ��������ƹ�ģ����Ч���������ԡ�
3������PLC������ػ���档����������������������Ҫ������װ�ò�����ʱ���Եĵ��źţ�ͬʱ
�����ź����������̲�ͬ�����Ӧ��
��1����������������ǰ������ź�1Ϊ“1”����2��������������������A�Σ��������������������͡��������˵�ס���װ�÷�����ĺ����ʱ������ź�Ϊ“0”������������������в�2��СԲ��
ʱ�����װ�÷����ź�2��3����Ϊ“1”����3��������������B�Σ�����ź�Ϊ“0”������ͣ�£���
������ͣ���ͣ�����10��ѹ�£��������û���“ͬ��1”�������˼������͡���4��������������C�Σ�
���������ͣ������ٵ�ס����⣬����ź�4Ϊ“1”������“ͬ��2”��ͣ��“ͬ��1”�������˼�����
�͡����˹��װ�ù������̽��������ݹ����װ�õĹ������̣�ֻҪ�ֳ��ⶨ�����������и������
�źŷ�����ʱ�䣬������������������źŵĹ�ϵ������PLCӦ�ó����е�������ݣ����Ʒ���Ҫ���
PLC����PLC��������ź�������PLC������ģ�飬���ԭ����źŵ������źš�������ͼ��ͼ6��
ʾ��
ʲô�й��SEW������
���SEW��������ͨ����ȡ���������ϵ�ͼ���������Ϣ����ʾ����SEW�����������ĵ��ת�ӵ�λ����Ϣ�ġ����ݹ��SEW�������Ĺ���ԭ�����Խ����SEW��������Ϊ����ʽ���SEW������������ʽ���SEW������������������¾���ʽ���SEW�������ĵĽṹ�빤��ԭ�������ܡ�
����ʽ���SEW�������Ľṹ�빤��ԭ��
�� ����ʽ���SEW��������ͼ��ʾ������ͨ����ȡ�������ϵĶ����Ƶı�����Ϣ����ʾ����λ����Ϣ�ġ�
�����������ǰ���һ���ı�����ʽ�Ƴɵ�Բ�̡�ͼ1�Ƕ����Ƶı����̣�ͼ�пհײ�������ģ���“0”����ʾ;Ϳ�ڵIJ����Dz���ģ���“1”����ʾ��ͨ������ɱ����Ȧ��Ϊ�����ÿ�������ʾ����������һλ������*������*��λ��*������*��λ�������������4����������������������ֱ��ʾΪ�����Ƶ�23��22��21��20��4λ�����ƿ��γ�16��������������˾ͽ�Բ�̻���16��������ÿ��������Ӧһ��4λ������������0000��0001��…��1111��
�����������γɵ����������Ӧ�Ĺ�紫������������Դ���������̡����������ܺ�����������·��������ת��һ���ĽǶ�ʱ����������������Ӧ�Ĺ��������ܵ�ͨ������͵�ƽ“0”���ڹ�������Ӧ�Ĺ��������ܲ���ͨ������ߵ�ƽ“1”�������γ�����뷽ʽһ�µĸߡ��͵�ƽ������Ӷ����������λ�ýš�
���SEW������ԭ��
�������SEW����������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ���������ĿǰӦ��*��Ĵ�������һ��Ĺ��SEW��������Ҫ�ɹ�դ�̺����װ����ɡ����ŷ�ϵͳ�У����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������źţ���ԭ����ͼ��ʾ��ͨ������ÿ����SEW�������������ĸ������ܷ�ӳ��ǰ�綯����ת�١����⣬Ϊ�ж���ת�������̻����ṩ��λ���90°��2��ͨ���Ĺ������������˫ͨ�������״̬�仯ȷ�������ת���ݼ��ԭ����SEW�������ɷ�Ϊ��ѧʽ����ʽ����Ӧʽ�͵���ʽ��������̶ȷ������ź������ʽ���ɷ�Ϊ����ʽ������ʽ�Լ����ʽ3�֡�
SEW������ԭ�����SEW����������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ�����������ĿǰӦ��*��Ĵ����������SEW���������ɹ�դ�̺����װ����ɡ���դ������һ��ֱ����Բ���ϵȷֵؿ�ͨ���ɸ������οס����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������źţ���ԭ��ʾ��ͼ��ͼ1��ʾ��ͨ������ÿ����SEW�������������ĸ������ܷ�ӳ��ǰ�綯����ת�١�
1.1����ʽSEW������
����ʽSEW��������ֱ�����ù��ת��ԭ��������鷽������A��B��Z�ࣻA��B����������λ��90��Ӷɷ�����жϳ�н���Z��Ϊÿתһ�����壬���ڻ��㶨λ�������ŵ���ԭ���������еƽ���������ڼ���Сʱ���ϣ�����������ǿ���ɿ��Ըߣ��ʺ��ڳ����봫�䡣��ȱ�����������ת���ľ���λ����Ϣ��1.2����ʽSEW������
����SEW��������ֱ������������Ĵ�������������Բ���������ؾ���������ͬ�������ÿ����������Ͳ���������������ɣ����������������Ŀ��˫����ϵ�������ϵ�������������Ķ����������λ���������̵�һ���ǹ�Դ����һ���Ӧÿһ�����һ����Ԫ���������̴��ڲ�ͬλ��ʱ��������Ԫ�������ܹ������ת������Ӧ�ĵ�ƽ�źţ��γɶ������������ֱ��������ص��Dz�Ҫ����������ת�������λ�ö��ɶ���һ���̶�����λ�����Ӧ�������롣��Ȼ�����Խ�࣬�ֱ��ʾ�Խ�ߣ�����һ������ Nλ�����Ʒֱ��ʵ�SEW�������������̱�����N�������Ŀǰ��������16λ�ľ���SEW��������Ʒ������ʽSEW��������������Ȼ�����ƻ�ѭ�������ƣ������룩��ʽ���й��ת���ġ�����ʽSEW������������ʽSEW��������֮ͬ������Բ�����⡢���������ͼ�Σ�����SEW�������������ɱ��룬���ݶ��������ϵı��룬������λ�á��������ƿɲ��ö������롢ѭ���롢�����Ʋ���ȡ������ص��ǣ�
1.2.1����ֱ�Ӷ����Ƕ�����ľ���ֵ��
1.2.2û���ۻ���
1.2.3��Դ�г���λ����Ϣ���ᶪʧ�����Ƿֱ������ɶ����Ƶ�λ���������ģ�Ҳ����˵����ȡ����λ����Ŀǰ��10λ��14λ�ȶ��֡�1.3���ʽ����ֵSEW������
���ʽ����ֵSEW�������������������Ϣ��һ����Ϣ���ڼ��ż�λ�ã����о�����Ϣ���ܣ���һ������ȫͬ����ʽSEW�������������Ϣ�����SEW��������һ�ֽǶȣ����ٶȣ����װ�ã������������ĽǶ��������ù��ת��ԭ��ת������Ӧ�ĵ���������������������С�����ȸߣ������ɿ�,�ӿ����ֻ����ŵ㡣���㷺Ӧ�������ػ�������ת̨���ŷ������������ˡ��״����Ŀ��ⶨ����Ҫ���Ƕȵ�װ�ú��豸�С�
����Ϊ�¹�SEW������ϵ�У�
ES1T 1852485 ES2T 1854607 ES1R 1860607 ES2R 1860615 ES1S 1860496 ES2S 186050X ES1C 1858661
ES2C 185867X EV1T 1857088 EV1R 1857118 EV1S 185707X EV1C 1855999 ES7R 13621580 EG7S 13630806
EG7C 13622072 EI7C 13619802 EG7R 13622099 ES7S 13630806 ES7C 13621572 ES16 1881361 AV1H 13635204
AV1Y 1988891 XS11Incremental encodersSEW����ʽ������ Type Type Installed to Signal Supply [V] EH1T Add-on encoder with hollow shaft AC motors DR63 5 V TTL (RS-422) 5 EH1S 1 Vpp sin/cos 10 – 30 EH1R 5 V TTL (RS-422) EH1C 24 V HTL ES1T / ES2T Add-on encoder with spread shaft DT71 – DV225 AC motors 5 V TTL (RS-422) 5 ES1S1 / ES2S1 CT71 – CV200 servomotors 1 Vpp sin/cos 10 – 30 ES1R / ES2R 5 V TTL (RS-422) ES1C / ES2C 24 V HTL EV1T Solid shaft encoder with coupling 5 V TTL (RS-422) 5 EV1S1 1 Vpp sin/cos 10 – 30 EV1R 5 V TTL (RS-422) EV1C 24 V HTL ES7S1 Add-on encoder with spread shaft DR71 – DR132 AC motors 1 Vpp sin/cos 7 – 30 EG7S1 Add-on encoder with plug-in shaft with end thread DR160 – DR225 AC motors EH7S1 Add-on encoder with hollow shaft DR315 AC motors 10 – 30 ES7R Add-on encoder with spread shaft DR71 – DR132 AC motors TTL-/RS-422 interface 9 – 26 EG7R Add-on encoder with plug-in shaft with end thread DR160 – DR225 AC motors ES7C Add-on encoder with spread shaft DR71 – DR132 AC motors TTL-/RS-422 interface 4.5 – 26 HTL interface EG7C Add-on encoder with plug-in shaft with end thread DR160 – DR225 AC motors EI7C Built-in encoder DR71 – DR132 AC motors HTL interface / 24 periods 9 – 30 EI7S sin/cos interface EI76 HTL interface / 6 periods EI72 HTL interface / 2 periods EI71 HTL interfac -
��Ӧ�̵����������Ϣ
�鿴����





-
��Ʒ����
�� ��